Wilbur Cross High School is a comprehensive public school with a very diverse student population. With the support of the families and friends of our students we strive to provide our students an education focused on academic excellence and social responsibility in a safe environment. Our goal is to challenge our students every day to become life long learners and well-rounded citizens. For this we hold them responsible to high standards and academic responsibility through rigorous instruction. Given the diverse socio-economic background of our students, effective differentiation and engaging classes are a necessary part of the instruction. I plan to reorganize the content of the curriculum such that include more hands-on activities presented in an engaging manner and connected to everyday life. The goal is that the students will be engaged and invested in their learning such their retention of the content will increase.
Teaching Physics in New Haven I soon realized that sometimes the standard Physics curriculum falls short in engaging students to be active learners. I acknowledge that school is not the first priority for some of my students as they have other curricular, extra-curricular, job and family responsibilities. Using the standard Physics activities I can engage students for a short period of time but after a while students loose interest if they don't see how the activities relates to their day-to-day lives.
Historically the hands on activities in Mechanics, one of the main content units in Physics, involve some kind of mechanical machine or setup. For example, one can set up a lever system to measure how much force you put it and what is the force output and calculate the mechanical advantage of it. This method will account for engaging some of my students that do some kind of household work or hands on project around the house but fails short in engaging the rest of my students. While teaching AP Physics this year I noticed that some AP type problems piqued the interest of my students. The questions were related to using mechanical formulas to calculate force input or output in human body, such as "what is the maximum weight you can lift with one hand, if you know the strength of your muscle and the point of connection to the bone". Following this observation I decided to expand on this type of problem, especially as many teenagers are interested in the limits of their own body and exploring how far to push them.
For this curriculum is I plan to integrate traditional Physics problems with a fresh approach of Physics in the human body point of view. A quick literature search revealed endless options of connecting Physics to real life. This unit will focus on "Mechanics – Simple machines: Bones and Muscle as types of levers" with possible extension into the following units:
|
1. Vectors: Honey Bees navigation
|
|
-
2. Mechanics – Forces: Adhesive forces (gecko) and Tensile Forces (spider silk)
-
3. Fluids: Human Heart (Fluid flow and pumps)
-
4. Energy and Thermo: Eating/Drinking
-
5. Optics – Lens in the human eye
In the first stage of this module I plan to focus on identifying simple machines in the human body and connect them to fundamental learning in physics. I will develop fundamental physics problems that will connect to real life. I will then develop higher thinking problems that will address medical applications of this knowledge. For example, one can calculate how much force an arm or a leg bone withstands during normal human activity and what kind of properties a building material will need to meet in order to be used as prosthetic material. After teaching the fundamental physics behind the simple machine and connections to medical applications students will have a week to work in class on the Human Body project. An extension of this activity is finalizing this project and present their finding to the class.
Mechanics
1
Physics is the study of matter and energy and the correlation between the two. Mechanics is a branch of Physics that deals with motion. Mechanics can be divided further into kinematics (describing motions) and dynamics (the causes of motion). In order to understand simple machines students need to have a basic understanding of describing motion and a basic understanding of energy and conservation of energy.
Force
In physics the force is considered a push or a pull that act on an object and it will cause a change in its movement, direction or shape. Net force is defined as the overall force acting on an object and it is the vector sum of all the forces acting on the object. A net force acting on an object that is considered a point particle will change its movement (start or stop moving, accelerate or decelerate) or will change its direction.
Torque
Torque is the rotational analogue of force. When a net force acts on a rigid body that is not considered a point particle it can cause the object to rotate about a rotation axis or a rotation point (called fulcrum or pivot). Mathematically, torque is defined as the cross vector of the force vector and distance vector (called lever-arm).
Equilibrium
An object is in equilibrium when the net force acting on is zero. An object is not in equilibrium when the net force acting on is different than zero. Static equilibrium, also called mechanical equilibrium, is the state in which the net force acting on an object is zero. Dynamic equilibrium, also called rotational equilibrium, is the state in which the net force acting on an object is zero and the net torque acting on an object is zero.
Kinematics
Kinematics is the branch of Mechanics that describe motion. Linear kinematics deals with motion in one direction, for example free fall, while two-dimensional kinematics deals with motion in two dimensions, for example projectile motion.
Dynamics
Dynamics is the branch of physics that studies the causes of motion and the effect of forces and torques on motion. Linear dynamics studies the motion of point particle objects under the action of a net force, while the rotational dynamics studies the motion and rotation of a rigid body under the action of a net force and/or net torque.
Simple machines
Simple machines are devices that make our life easier either by minimizing the force we need to put in to achieve a goal (levers, wedges, etc) or by changing the direction of the force we apply (pulley). There are six simple machines. All other machines are made of at least two simple machines and are called complex machines. The six types of simple machines are presented below.
2a, 3
They can be classified as "levers" (1-3) or "inclined planes" (4-6):
-
1. Lever is a stiff rod that rotates around a pivot point or fulcrum. When a downward force is applied at one end the result is an upward force at the other end. A lever can either multiply the applied force or the distance over which the force is applied. Depending on the relative position of fulcrum, input force and output force, there are three classes of levers (see next unit).
-
2. Pulley is a wheel with a cord wrapping around it (in a groove). The rotation of the wheel (pulley) results in a linear movement of the cord, either up or down.
-
3. Wheel and axle is a version of pulley in which the pulley, the wheel, is locked to its central axle. The long motion of the rotating wheel results in a stronger, shorter motion of the axle.
-
4. Inclined plane is a simple machine that helps lifting objects vertically by moving them across a distance. A common inclined plane is a ramp.
-
5. Wedge is a type of inclined plane that converts motion in one direction into a splitting motion that acts at right angles to the "blade" (wedge).
-
6. Screw is simple machine that converts rotational motion in linear motion (forwards or backwards). Screw is basically an inclined plane wrapped around a cylinder.
Levers
Lever is a stiff rod that can rotate around a pivot point, called fulcrum. By applying a downward force (input force or effort) at one end we achieve an upward motion (output force or load) at the other end. Depending on the positions of fulcrum, input force and applied force, one can define three types of levers: first class, second class and third class. The three different classes of levers and an example for each are presented in Figure 1.
In a first class lever, the fulcrum is located between the input force and output force; in a second class lever, the output force is between the fulcrum and the input force, while in a third class lever, the input force is between the fulcrum and the output force.
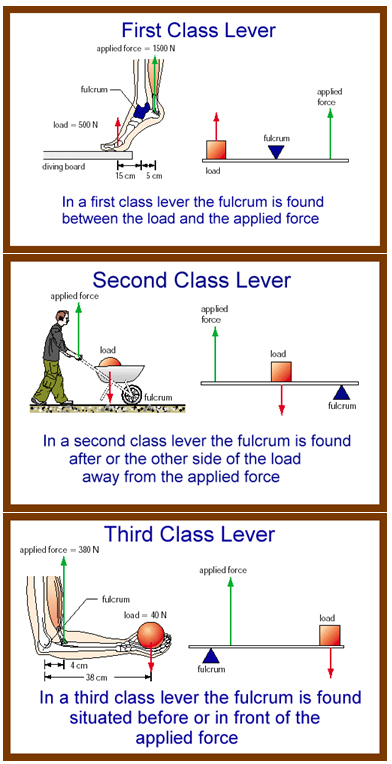
Figure 1: First, second and third class levers, definitions and examples (open source
4
)
Levers in the human body
Ask students to identify levers in the human body. They should be able to come up with a list that includes at least the arms, the legs and the mandible. You can have a skeletal drawing of the human body such that students can directly identify these levers on the drawing.